- Identifier les échelles temporelles et spatiales pertinentes de description d’un mouvement.
- Choisir un référentiel pour décrire le mouvement d’un système.
- Expliquer, dans le cas de la translation, l’influence du choix du référentiel sur la description du mouvement d’un système.
- Décrire le mouvement d’un système par celui d’un point et caractériser cette modélisation en termes de perte d’informations.
- Caractériser différentes trajectoires.
- Capacité numérique : représenter les positions successives d’un système modélisé par un point lors d’une évolution unidimensionnelle ou bidimensionnelle à l’aide d’un langage de programmation.
- Définir le vecteur vitesse moyenne d’un point. Approcher le vecteur vitesse d’un point à l’aide du vecteur ⃗⃗⃗⃗déplacement MM′, où M et M′ sont les positions successives à des instants voisins séparés de Δt ; le représenter. Caractériser un mouvement rectiligne uniforme ou non uniforme.
- Réaliser et exploiter une vidéo ou une chronophotographie d’un système en mouvement et représenter des vecteurs vitesse.
- Capacité numérique : représenter des vecteurs vitesse d’un système modélisé par un point lors d’un mouvement à l’aide d’un langage de programmation.
- Capacités mathématiques : représenter des vecteurs. Utiliser des grandeurs algébriques.
- Réaliser et exploiter une vidéo ou une chronophotographie d’un système en mouvement à une dimension et représenter des vecteurs variation de vitesse.
- Capacité numérique : représenter des vecteurs variation de vitesse d’un système modélisé par un point lors d’une évolution unidimensionnelle ou bidimensionnelle à l’aide d’un langage de programmation.
- Capacités mathématiques : sommer et soustraire des vecteurs.
Relativité du mouvement
Imaginez-vous assis dans le train qui est lui-même en mouvement. Il y a donc plusieurs façons d’étudier un mouvement en fonction du référentiel dans lequel on se place :

Si on considère un référentiel situé à l’intérieur du train, avec votre siège comme référence, alors vous êtes immobile durant la période où l’on étudie le mouvement car sa position ne s’est pas modifiée entre deux observations t0 et t1.
Si on se place à l’extérieur du train, un observateur vous verra vous déplacer car le train se déplace. Si cet observateur filme le mouvement du train il sera capable de définir votre trajectoire qui est ici une ligne droite (en imaginant que le train se déplace en ligne droite sur ce tronçon de voie).
Les principales informations qui permettent de définir un mouvement : sa trajectoire, sa vitesse et son accélération dépendent donc du choix d’un référentiel. Celui-ci est défini par rapport à un objet fixe qui ne se déplace pas durant le mouvement (le siège dans le premier cas, la voie dans le second exemple ci-dessus).
Si on change de référentiel, le mouvement ne sera pas le même !
Pour pouvoir suivre un mouvement de façon précise, une fois que le référentiel est choisi il convient d’y placer un repère.
Repère d’espace et trajectoire
Un repère d’espace doit être choisi judicieusement par rapport au mouvement étudié. Par exemple sur un terrain de tennis, un repère de ce type pourrait permettre de suivre la trajectoire d’une balle :

Le repère suit ici le bord du terrain de tennis. Il est constitué de deux axes perpendiculaires : l’abscisse est l’axe x et l’ordonnée est l’axe y. Il faudra définir une échelle, généralement le mètre. L’ensemble sera nommé repère orthonormé.
La balle ayant une certaine taille, on doit choisir un point de celle-ci afin de pouvoir étudier la façon dont elle se déplace. En général il faut choisir un point au centre de l’objet, mais il possible de prendre un point à la périphérie de celui-ci si on étudie un mouvement circulaire par exemple.
Il existe plusieurs méthodes pour suivre un mouvement rapide :
- La chronophotographie : elle consiste à photographier à intervalle régulier un objet en mouvement. Ces images peuvent ensuite être superposées sur une même vue pour faciliter l’étude.
- L’analyse vidéo : avec la multiplication des possibilités d’enregistrer des vidéos avec des téléphones portables, appareils photos, caméras…et les fortes capacités de traitement des ordinateurs modernes, il est possible de filmer un mouvement et de le traiter dans un logiciel qui donnera les informations sur le mouvement.
Remarque : Sur des appareils numériques, les vidéos sont souvent enregistrées à 25 images par seconde. L’intervalle entre chaque image est alors de 1/25 = 0,04 s ou 40 ms.
Dans tous les cas, pour suivre un mouvement, il faut pouvoir déterminer à intervalle de temps régulier les coordonnées x et y de chaque point de mesure (voir schéma). Pour cela on réalisera un chronométrage. A chaque point de mesure correspond alors une date t compté à partir du moment où l’on commence à étudier le mouvement qui sera identifié comme origine t0=0.
A chaque instant t de mesure on pourra donc associer les coordonnées x et y du point de l’objet étudié.
Différent types de trajectoires
Un ensemble de vocabulaire va permettre de qualifier le mouvement étudié.
Selon le type de trajectoire, constituée par l’ensemble des points de mesures dans le référentiel, qui indiquent le sens (droite, gauche, haut, bas…) et la direction (verticale, horizontale…) du mouvement.
- Si la trajectoire est une droite, on dit qu’elle est rectiligne.
- Si la trajectoire est un cercle, on dit qu’elle est circulaire.
- Si la trajectoire est une courbe, on dit qu’elle est curviligne.

Référentiels dans l’espace
S’il est relativement simple de choisir un repère sur Terre, il est parfois plus compliqué de le faire pour les mouvements spatiaux car tous les astres (étoiles et planètes) sont en mouvement les uns par rapport aux autres.
La façon dont se mouvaient les astres a longtemps été un sujet majeur et a même valu au célèbre astronome italien Galilée d’être emprisonné pour avoir confirmé les hypothèses de Copernic quand à la rotation de la Terre autour du Soleil.
Jusqu’au début du XVIIe siècle il était admis que la Terre était au centre du monde. Les trajectoires des planètes étaient donc définies selon un modèle géocentrique (avec le Terre pour centre). Les mathématiciens et les astronomes devaient faire des calcules et des tables très compliquées pour prévoir les positions des planètes dans un tel système.
Mouvements géocentriques apparents du Soleil, de Mercure et de Venus :
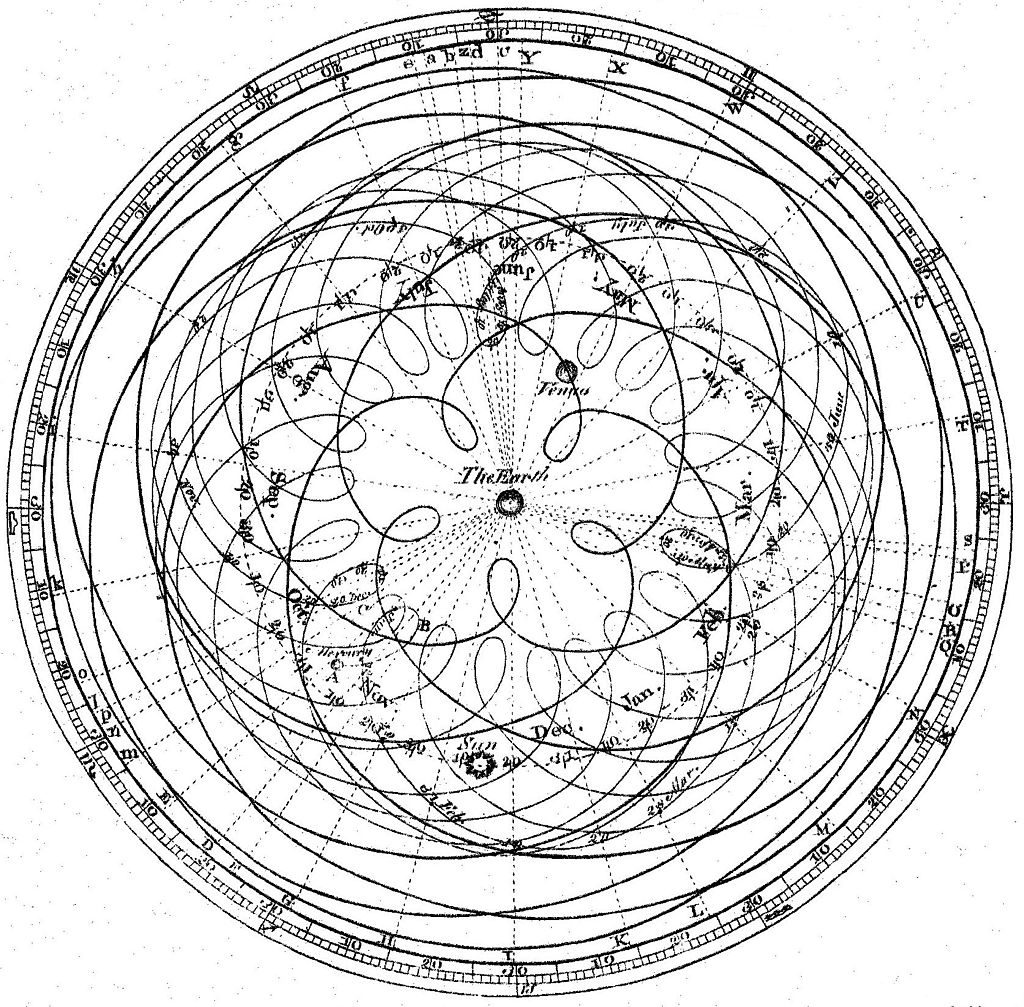
Encyclopaedia Britannica (1st Edition, 1771; facsimile reprint 1971
Depuis Galilée nous savons que c’est la Terre qui tourne autour du soleil. Même si la trajectoire de la Terre n’est pas un cercle parfait, nous pouvons utiliser un cercle pour la modéliser. De ce point de vue, la trajectoire de la Terre est donc circulaire et simple à étudier, mais ce ne sera pas le cas de la trajectoire de la Lune autour du Soleil (héliocentrique) car celle-ci tourne autour de la Terre en 28 jours et de demi pendant que la Terre tourne autour du Soleil en 365 jours et 6 heures.
Une modélisation des trajectoires de la Terre et de la Lune montre que celle-ci a une trajectoire complexe qualifiée mathématiquement d’épicycloïde, représentée ici sur 8 ans :

Le choix d’un référentiel qui donne la trajectoire la plus simple possible, compte tenu des éléments qui doivent être déterminés, est donc primordiale, comme on peut le constater, à une échelle plus proche de nous, en comparant les trajectoires d’un vélo et d’un point sur la roue d’un vélo à partir d’une chronophotographie :

La vitesse
Comme nous disposons des coordonnées des différents points de mesures, nous pouvons en déduire la distance qui sépare ces points. Nous savons également à quel intervalle de temps les mesures ont été faites. De ces deux informations nous pouvons déduire la vitesse de l’objet à chaque point de mesure :
v=\frac{d}{\Delta t}Unités :
- V : vitesse en mètres par seconde (m.s-1)
- d : distance entre deux points de mesure en mètre (m)
- Δt : durée en secondes (s). Δt = tn – tn-1
La variation de cette vitesse au cours du mouvement va également permettre de qualifier ce mouvement :
- Si la vitesse reste la même, le mouvement est dit uniforme : la distance entre chaque position successive reste la même.
- Si la vitesse augmente, le mouvement est dit accéléré : la distance entre deux positions successives augment.
- Si la vitesse diminue, le mouvement est dit ralenti : la distance entre deux positions successives diminue.
Remarque : la précision des mesures est cruciale si l’on souhaite étudier convenablement un mouvement. Il faut donc savoir évaluer les sources d’erreurs dans cette étude : manque de précision sur la position d’un point (par exemple avec mouvement trop rapide pour la méthode d’enregistrement), latence au moment de déclencher le chronomètre…
Ainsi, l’utilisation de la photo « finish » en plus du chronométrage a permis de lever de nombreuses contestations pour les compétitions de courses à pied.

Photo finish de la finale du 100m aux championnats du monde d’athlétisme à Osaka en 2007
Vecteur vitesse
Afin de visualiser à la fois la vitesse et la trajectoire d’un objet, on peut utiliser le vecteur vitesse .
Un vecteur est un objet mathématique qui possède :
- Un point d’application : ce sera le point pour lequel on étudie la vitesse (par exemple M4 ci-dessous)
- Une direction : c’est la droite selon laquelle est tracée le vecteur, tangent à la trajectoire. Dans le cas d’une vitesse moyenne on peut prendre une droite située entre le point précédent le point considéré et celui qui le suit (M3 et M5 ci-dessous)
- Un sens : c’est le sens du mouvement
- Une norme (valeur ou intensité) : c’est la grandeur de la vitesse. Sur le graphique on pourra représenté la vitesse à l’échelle si on définit celle-ci (par exemple : 1cm représente 1m.s-1)

Ainsi, dans l’exemple ci-dessus, le vecteur vitesse moyenne au point M4, appelé \overrightarrow{\mathrm{V}_{4}} , est défini par le vecteur déplacement \overrightarrow{\mathrm{M}_{3} \mathrm{M}_{5}} par la relation suivante (qui découle de celle vue plus tôt) : \overrightarrow{\mathrm{v}_{4}}=\frac{\overrightarrow{\mathrm{M}_{3} \mathrm{M}_{5}}}{\mathrm{t}_{5}-\mathrm{t}_{3}}
Et sa norme (sa valeur), sera calculée avec la relation : v_{4}=\frac{M_{3} M_{5}}{t_{5}-t_{3}}
Avec :
- M3M5: distance entre M3 et M5 en mètre (m)
- t5-t3: intervalle de temps entre les instants t5 et t3 en seconde (s)
- v4 : vitesse en M4 en mètre par seconde (m.s-1)
Variation du vecteur vitesse
La représentation du vecteur vitesse permet d’avoir une information visuelle rapide sur l’évolution de la vitesse :
- si longueur des vecteurs vitesses augmentent, c’est que le mouvement est accéléré.
- si longueur des vecteurs vitesses diminue, c’est que le mouvement est ralenti.
- si la longueur des vecteurs vitesse reste la même c’est que le mouvement est uniforme.
De même, la direction du vecteur vitesse pourra nous donner une bonne idée de la trajectoire du mouvement pour savoir si le mouvement est rectiligne, circulaire ou curviligne.